みなさん、こんにちは。
担当Kです。
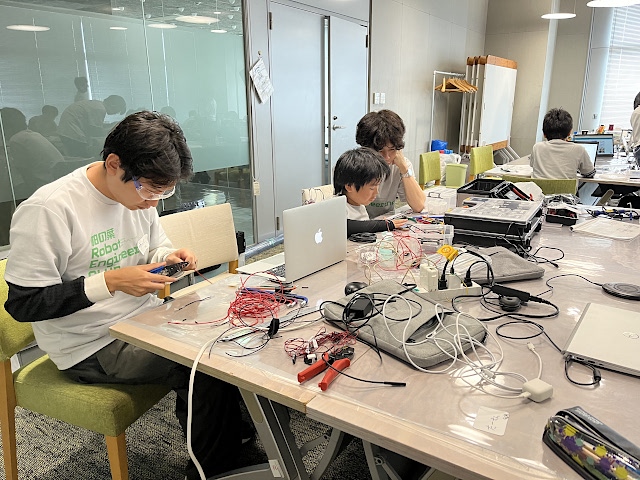
今回は、9月28日に行われた、柏の葉ロボットエンジニアリングクラブの活動をレポートしていきます。
前回のレポートはこちら↓↓↓

新たな講師 朝の会
今日は、前回まで来られていた二ツ井さんにかわられて、中村さんと加藤さんが来られました。
中村さんは、名古屋のジュニアロボットチームの講師をされている方です。今回の活動では、主にプログラミングを教えてくれます。

こちらが中村さん
また、加藤さんは栃木から来られている方で、ロボット製作の教材の作成をされています。
こちらが加藤さん
調整の連続 ジュニアチーム メカ担当 午前
ジュニアチームのメカ担当は、前回に引き続き部品の取り付けを行っています。
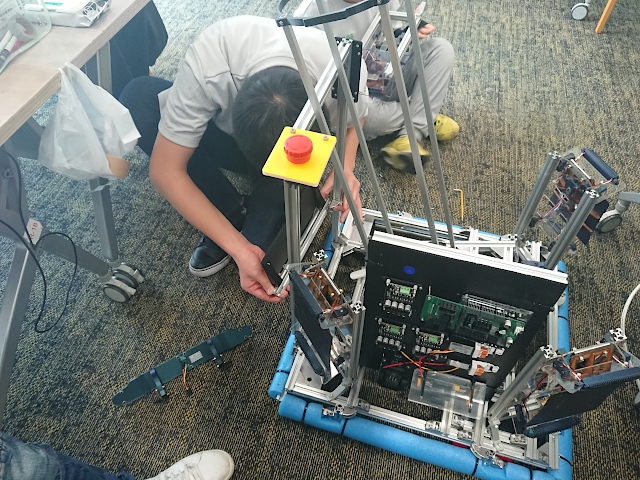
非常停止取り付けユニットに部品を取り付けようとしている様子
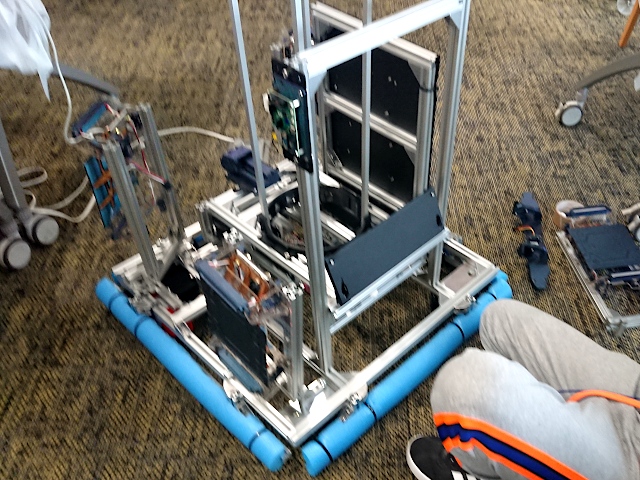
ここで、ろんくんがあることに気がつきます。それは、非常停止ユニットの位置が、完成イメージのCADと見比べると手前すぎるということです。
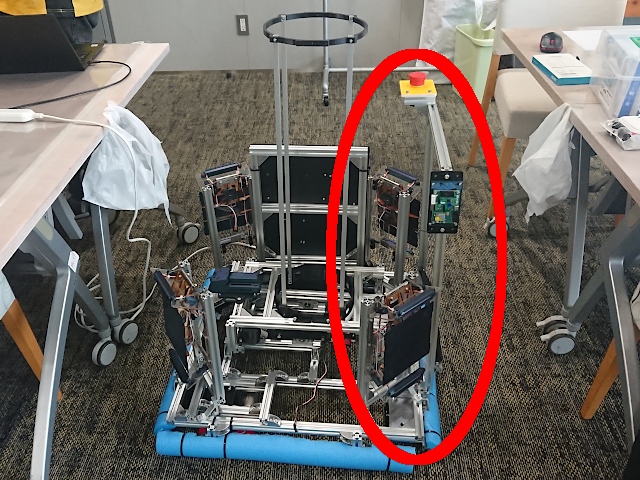
【実物の写真】 赤丸で囲った部分が非常停止取り付けユニット。確かに手前すぎるかも…
というわけで、非常停止取り付けユニットを一度取り外し、後ろに移動させて再度取り付けることにしました。
そのまま後ろに下げようとしましたが、ダメージユニットが邪魔で、取り付けできそうなスペースがありません。そのため、ダメージユニットも一旦撤去します。

取り外されたダメージユニット
その後、開いたスペースに非常停止取り付けユニットを取り付けていきます。ろんくん一人での取り付けはかなり大変そうだったので、私も手伝いました。
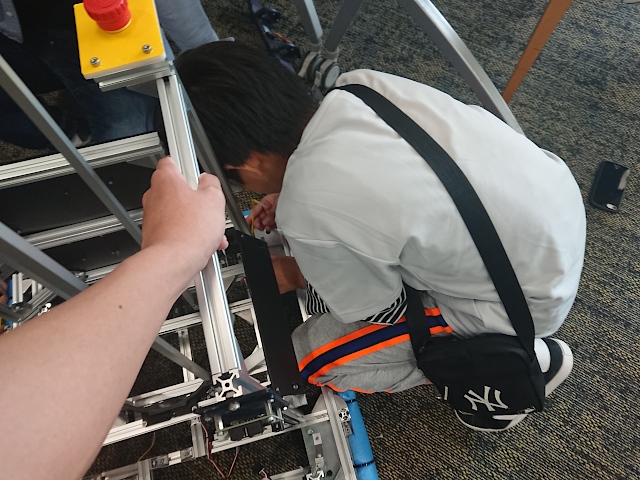
取り付けの様子。手前から伸びている腕は私のもので、ユニットを支えている
これで、非常停止取り付けユニットの移動が完了しました。
無事に移動完了!(少しブレていてごめんなさい)
最後に、一度取り外したダメージパネルをベースユニットに戻します。

ダメージユニットを再度取り付けている様子
一方その頃、他の人たちは、大人チームに続いてケーブル製作を始めました。
ケーブル製作の様子
Re:圧着から始めるケーブル製作 大人チーム メカ担当 午前
大人チームのメカ担当は、ケーブルを作り直すところから始めました。
今回は、導線が露出しないように気をつけながら製作していきます。
圧着端子を取り付けている様子
また、前回終わらなかった分のはんだ付けもしていきます。
はんだ付けの様子
1時間半かけて、ケーブルの作り直しが終わりました。先生にチェックしてもらったところ、無事にOKをもらうことが出来ました。
完成した配線は、配線担当の手に渡り、順次接続されていきました。
配線の様子
続・電気回路講座 ジュニアチーム・大人チーム コントローラー・プログラム担当 午前
各チームのコントローラー・プログラム担当は、中村先生のもとに集まり、電気回路の解説を受けました。
まずは前回までの復習をした後、これまで学んだことを活かして、モーターを正転・逆転させる回路を考えました。

周りの人と相談しながら、回路を考えました
その次は、ブレーキをかける回路や、危険なので絶対に作ってはいけない回路の説明を聞きました。
また、モータなどの各パーツについての解説も受けました。
解説を聞いている様子
解説を聞いた後は、各パーツによってロボットがどのように動作するのかを考え、発表しました。
考えている様子
そして、実物を確認して、改めてどのような動きをするのかを学びました。

先生が、実際のパーツを見せながら、解説してくれています
ハンダ付けに大苦戦!! ジュニアチーム 午後
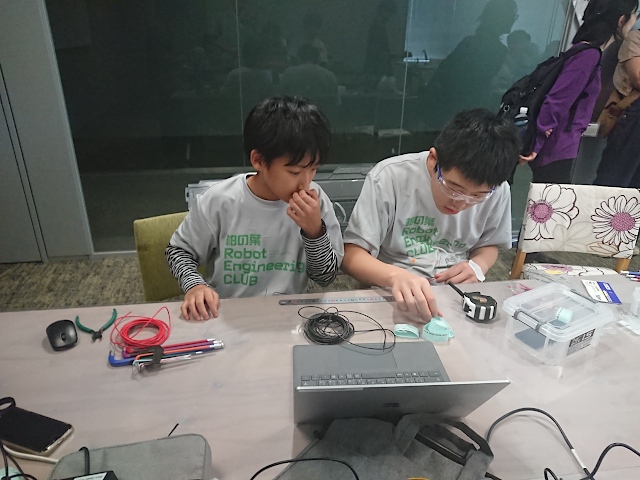
午後のジュニアチーム メカ担当は、主にケーブル製作と配線を行いました。
ケーブル製作の様子。大人チームのゆうたくんが手伝ってくれた
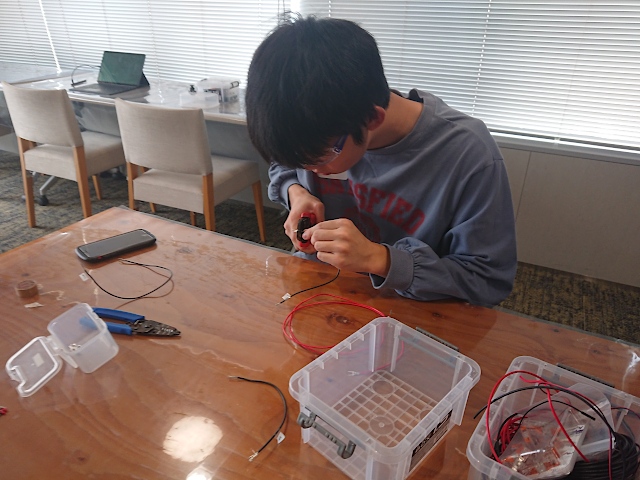
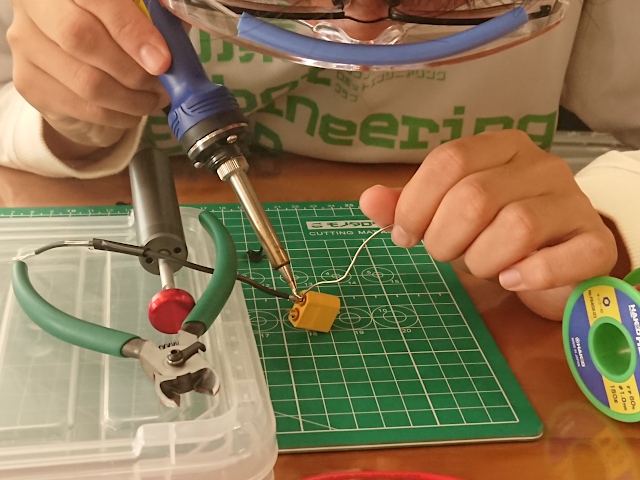
また、こちらもコネクタのはんだ付けも行いました。
このはんだ付け作業が、思いの外苦戦しました。
はんだ付けを行うろんくんは、今回が初めてのはんだ付けのようです。
そのため、なかなか上手にハンダを付けられません。
加えて、そのハンダ付けをするコネクタ自体も小さく、作業は困難を極めます。
時間をかけながらも、1本ずつ、確実にはんだ付けをしていきます。
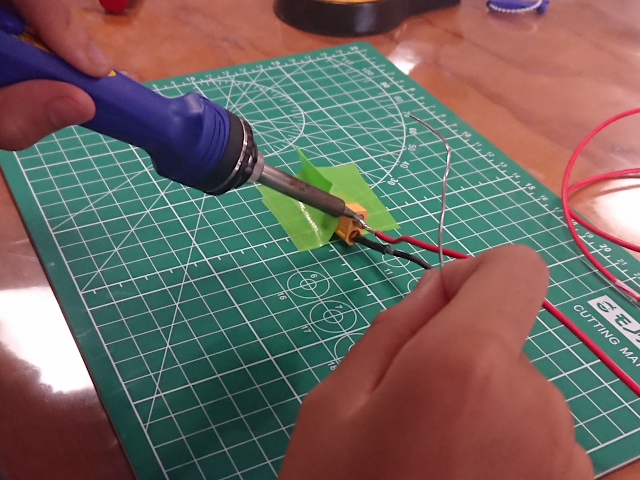
はんだ付けに苦戦の様子
午後の活動時間をいっぱいに使って、はんだ付けが必要なコネクタを全て取り付けることが出来ました。
アクシデント発生!! 大人チーム メカ担当 午後
大人チームのメカ担当は、引き続き配線をしていました。
ですが、途中で部品が足りなくなってしまいました。
そこで、別の部品を使って代用したり、作業が出来ない間は他の作業に移ったりしました。
ところが、またもやアクシデントが大人チームに襲いかかります。
今度は、部品の名前を間違えて覚えていたようで、どれがどの部品なのかがわからなくなってしまいました。
そのため、部品の名前を全員で再確認しました。
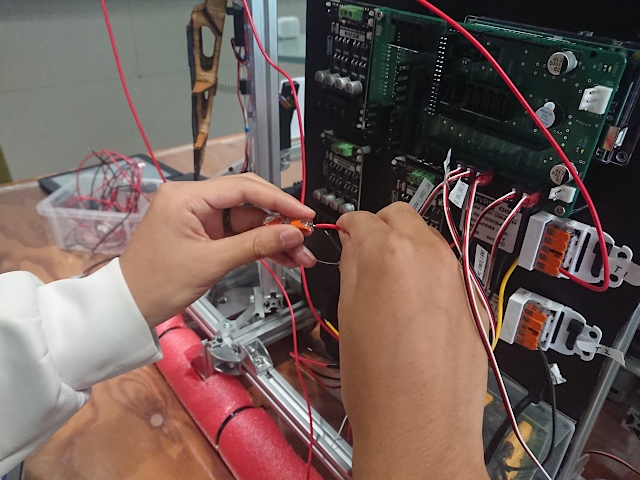
そうこうしていたら、どういうわけか基盤から部品が取れてしまいました。
しかし、慌てることなく、取れた部品を応急処置としてはんだ付けで取り付けました。
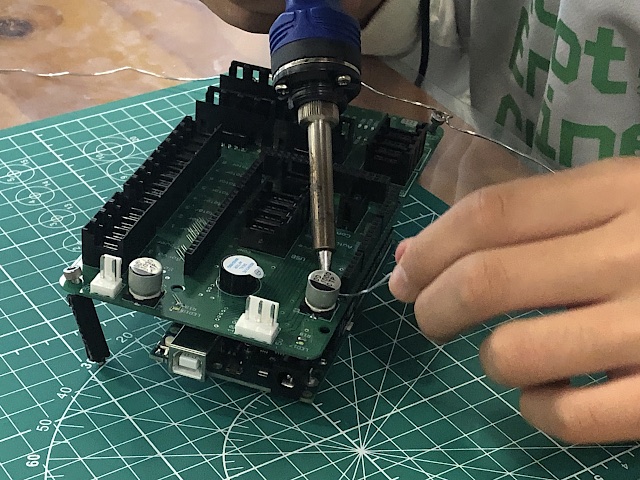
外れた部品を慎重にはんだ付けして、取り付けていきます
このように、アクシデントに冷静に対処していました。
Let’s プログラミング! ジュニアチーム・大人チーム コントローラー・プログラム担当 午後
コントローラー・プログラム担当の午後は、ついにロボットのプログラミングを始めます。まずは、先生が今回のロボットにおけるプログラムの必要性を説明しました。
なぜプログラムが必要なのか、それは、コントローラーからの信号を受け取っても、それを処理するプログラムがないと何も起こらないからです。また、コントローラーの信号を処理するためには、各パーツと対応する配線の確認が大事ともおっしゃられていました。
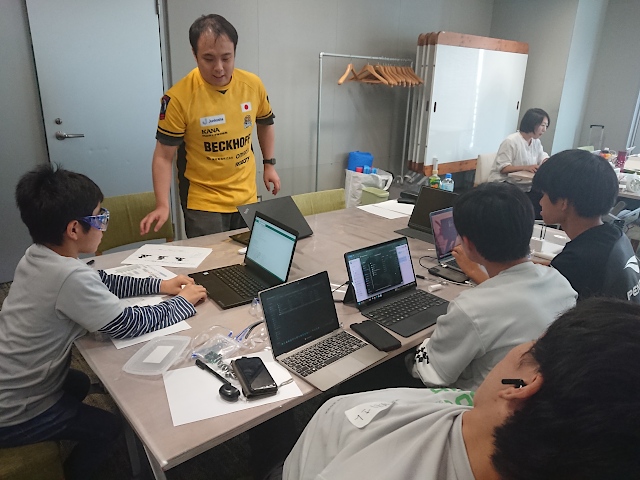
みなさん真剣に解説を聞いています
さて、プログラムの必要性がわかったところで、プログラミングを始めました。
大人チームは、一からコードを書いていきます。
一方のジュニアチームは、穴抜きになっているプログラムを埋めていきました。

プログラミングの様子
安全意識と当事者意識 終わりの会
終わりの会では、いつも通り、振り返りをしました。

振り返りの様子
その後は、先生から今回の活動のフィードバックをもらいました。
そのなかからピックアップしたいのは、安全意識が足りていないと指摘されたことです。中村先生によると、作業中によそ見をしていたり、はんだ付けをしている人の後ろをドタバタしていたりと、危険な瞬間が見受けられたそうです。そのような危険な瞬間は、事故につながりかねないので、安全意識を高めてほしいと、おっしゃられていました。

中村先生に安全意識を指摘されている様子
また、近藤先生からは、チームでロボットを作っているという当事者意識をもってほしいとも言われました。
というわけで当事者意識を持ってもらうべく、名乗り出た人に終わりの会を締めてもらうことになりました。
大人チームのリーダー、づっきー兄が名乗り出たので、前に出てもらい、終わりの会を締めてもらいました。

「残り2回を記憶に残るような回にしよう」と、みんなを励ました
今回の活動を振り返って
今回の活動では、どちらのチームからも、積極的にロボット製作に取り組む姿勢が見られました。しかし、非常停止取り付けユニットの位置が少しズレていたり、ケーブルを作り直していたり、部品の管理が甘かったりと、その姿勢は、ただ完成を急いでいるようにも感じられました。また、先述の通り、安全意識が足りていないようにも見受けられました。さらに、中村先生によると、ロボット製作に答えはないのに対して、メンバーの行動は何か答えを探しているようにも見えるようです。
これらを受けて、中村先生は、次回の朝の会で、「いいエンジニアとはなにか」という観点から、安全意識や製品意識、そして、ロボットクラブの活動を通して育成したい7つの価値観について語れれるそうです。7つの価値観とは、一体どういったものなのでしょうか?
それでは、次回の活動報告をお楽しみに。
続きはこちら↓↓↓


 【お仕事体験レポ】ラムネでお薬を作る薬剤師体験!|かしわ環境フェスタin柏の葉2024
【お仕事体験レポ】ラムネでお薬を作る薬剤師体験!|かしわ環境フェスタin柏の葉2024 ラムネ作りで薬剤師体験!「医療のエコ活動」ってなんだろう? ~in 柏の葉イノベーションフェス2024~
ラムネ作りで薬剤師体験!「医療のエコ活動」ってなんだろう? ~in 柏の葉イノベーションフェス2024~ “からだとこころのコンディショニング”してみませんか? ママのためのヘルスケアプログラム「健幸スマイルスタジオ」
“からだとこころのコンディショニング”してみませんか? ママのためのヘルスケアプログラム「健幸スマイルスタジオ」 〔求人〕第6期ママライター募集!!
〔求人〕第6期ママライター募集!! カロママ+、ベジチェック、歩行チェック、ママでも気軽に楽しく健康になれるサービスを取材しました。
カロママ+、ベジチェック、歩行チェック、ママでも気軽に楽しく健康になれるサービスを取材しました。