みなさん、こんにちは。
担当Kです。
今回は、柏の葉エンジニアリングクラブの特別回のレポートをしていきます。
前回のレポートはこちら↓↓↓

前回は、ロボットを起動させることができませんでしたが、あれから数日後、先生たちの魔法の力(物理)によって起動させることができました。今回の活動では、本番に向けてロボットの調整をしていきます。
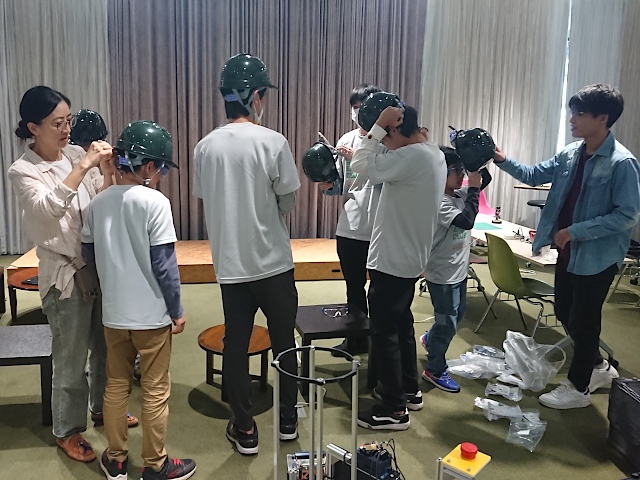
今回は臨時の活動ということで、参加は任意でしたが、ジュニアチームが4人、大人チームが3人の、あわせて7人が来てくれました。
早速、作業に入る前に、今回はロボットが動くことからヘルメットが配られました。
ロボットを動かせ!! ジュニアチーム・大人チーム
まずは両チームとも、配線の処理を行います。
配線をできる限り束ねていきます。
また、同時並行で全体的な点検を行いました。
特にジュニアチームのロボットは、ネジがあちこち緩んでいたので、きつく締め直しました。

ネジをきつく締め直している様子(ブレていてごめんなさい)
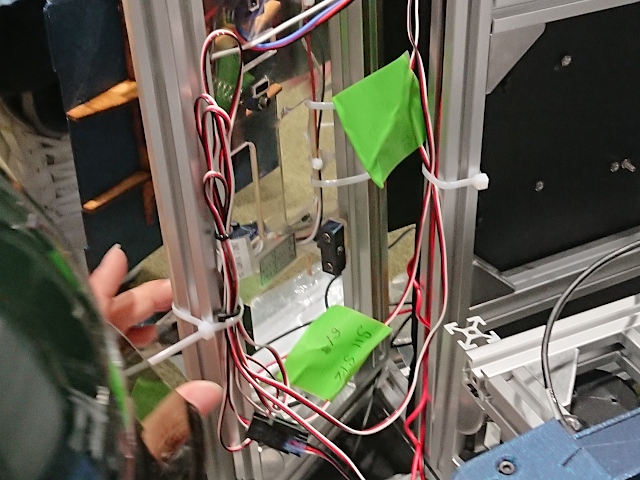
さらに、カメラモジュールの映像を送信するための、HDMI送信機も取り付けました。
HDMI送信機をフレームに取り付けて、カメラモジュールとメインモジュールに配線を接続しました
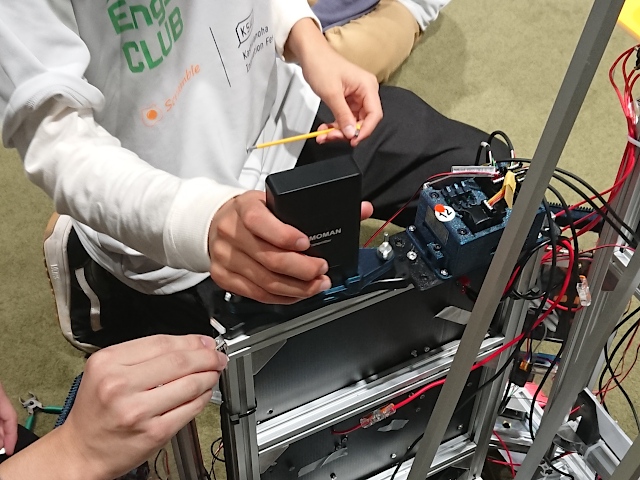
ここで近藤さんが、ジュニアチームのロボットの回路ユニットにカバーを付けてくれました。これで、回路ユニットがダメージを負う可能性がぐんと低くなりました。
回路ユニットのカバー
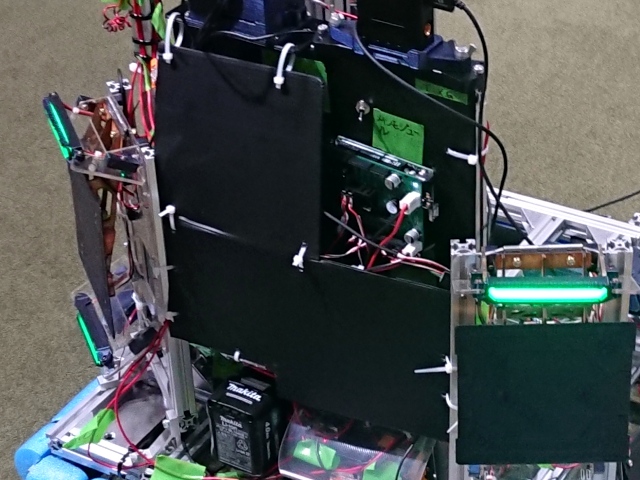
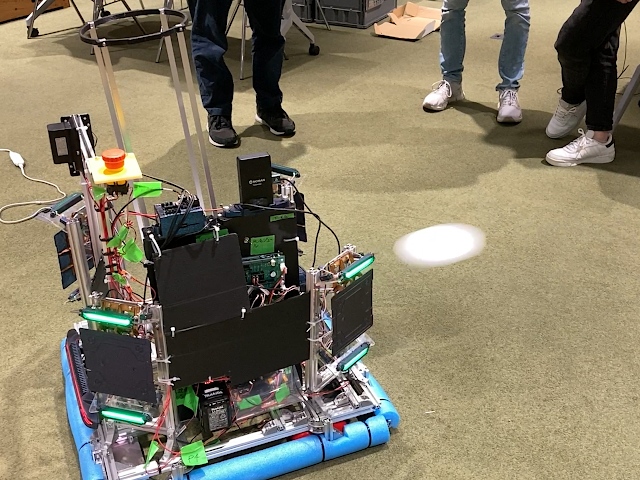
さて、ジュニアチームはひと通りの調整が完了したので、ロボットを動かしてみます。まず、オートレフェリーのスイッチをオンにすると、ダメージパネルのランプが点灯しました。
少し見えにくいかもしれませんが、ダメージパネルのランプが点灯しています
続いて、ロボットとコントローラーの電源をオンにしました。すると、何もしていないのに、ロボットがひとりでに右回りに回りだしました。
これは、コントローラーのスティックのニュートラルポジション(初期位置)がズレていることが原因のようです。
ニュートラルポジションの問題はひとまずは置いておいて、発射ユニットの動作確認をしてみました。
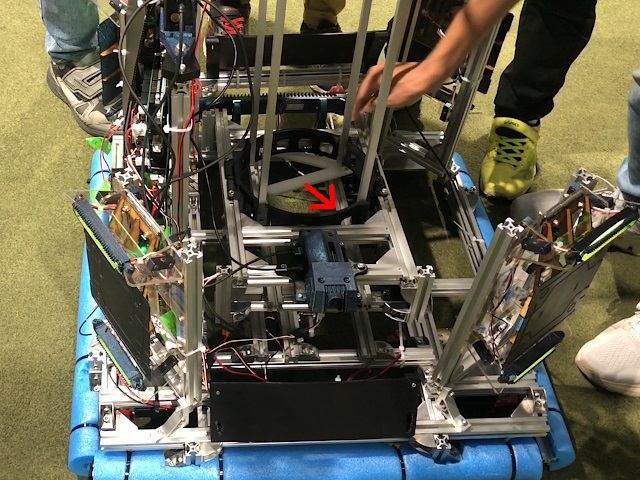
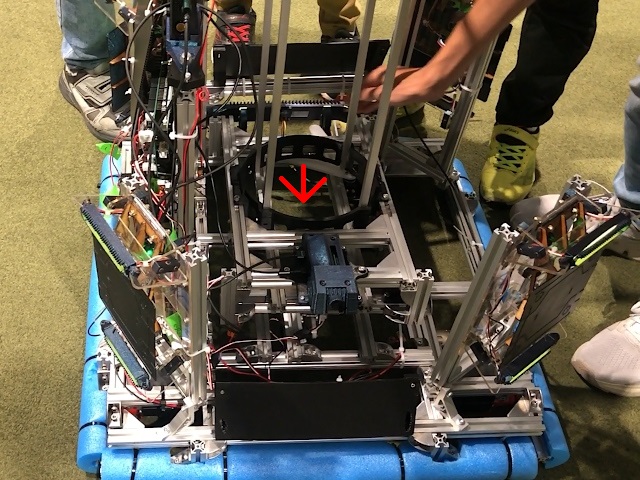
すると、装填用のサーボモータと、発射用のサーボモータが動き出しました。

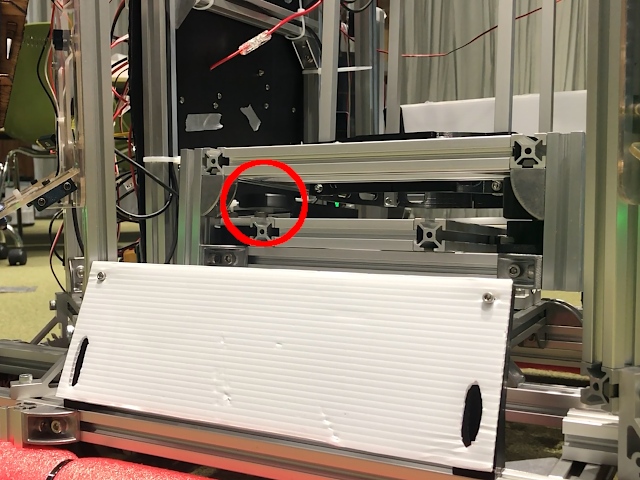
赤丸で囲ったのが装填用のサーボモータで、これとは別に発射用のローラーとそれを回すサーボモータがある
サーボモータの動作確認が取れたので、サーボモータがマガジンにセットしたフリスビーに当たるように調整をします。
現時点ではこうなっているのを・・・
サーボモータの初期位置を調整して、このようにしていきます
マガジンユニットなどを取り外して、サーボモータを摘出したあと、ネジを回して初期位置を変えていきます。

調整の様子
一方、大人チームは、こちらも動作確認に入りました。
まず、オートレフェリーのスイッチを入れると、ダメージパネルのランプが点灯しました。
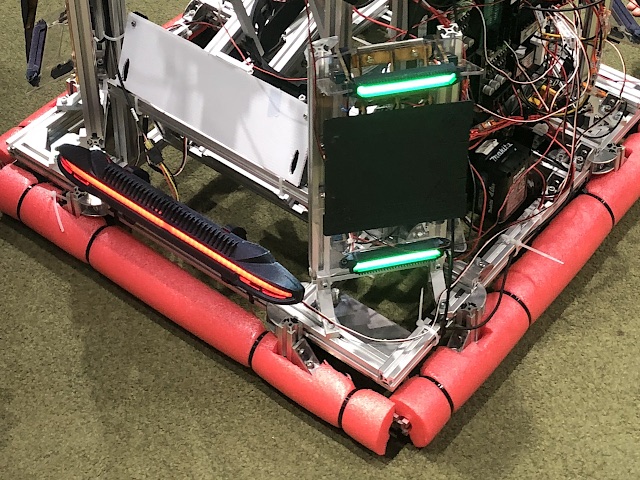
ダメージパネルのライトが点灯しています
続いて、ロボットとコントローラーのスイッチをオンにして、ロボットを少し動かしてみたところ、ちゃんとロボットが動いてくれました。
そして、フリスビーの発射操作をしてみました。
すると、「コトッ」となにかが落ちる音がしました。
ロボットを止めて確認してみると、フリスビーを発射して飛ばすためのローラーが取れてしまったようです。
赤丸で囲った部分がローラー。これがとれてしまったようです
ローラーを取り付けしなおして、再度、発射操作をしてみます。しかし、またローラーが取れてしましました。その後も何度か発射操作を行いましたが、毎回ローラーが取れてしまいます。
ジュニアチームの様子に戻って、こちらはサーボモータの調整が完了したようです。早速フリスビーを入れて、発射させてみます。
すると、「コトッ」となにかが落ちる音がしました。
どうやらこちらも、発射用のローラーがとれてしまったようです。
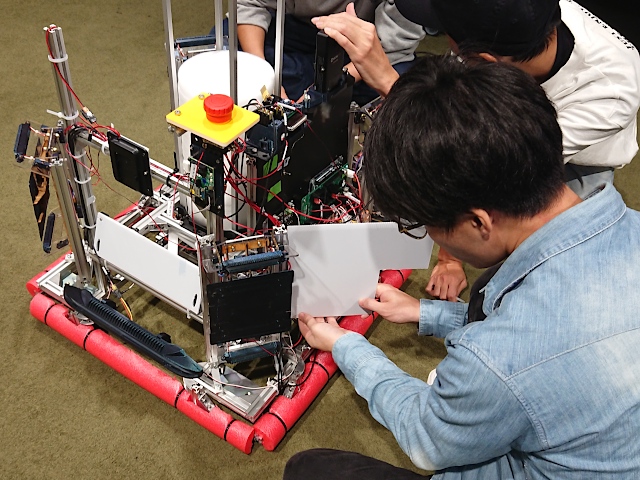
「何がどうなった?」と確認している様子
さらにここで、今回の活動時間が終わってしまいました。ジュニアチームのみんなは残って作業をしたいと先生に頼みますが、ジュニアチームは帰る時間が決まっており、それを後ろにずらすことはできないと言われてしまいました。
そこでジュニアチームのみんなは、ロボットを先生たちに託すことにしました。
ジュニアチームのロボットの運命は、この2人の先生に託されました
一方で大人チームは時間の融通が効くため、残って作業を続けました。
ローラーが取れてしまう問題は、接着剤での固定を試みましたが、あまり効果がありませんでした。そこで、ローラーの軸を入れる部分の穴を深くしてみます。
穴を深くして再びローラーを取り付けた後、発射操作を行いました。これが効果てきめんで、ローラーが取れてしまうことがなくなりました。フリスビーを実際に装填して発射させてみたところ、勢いよくフリスビーが飛んでいきました。
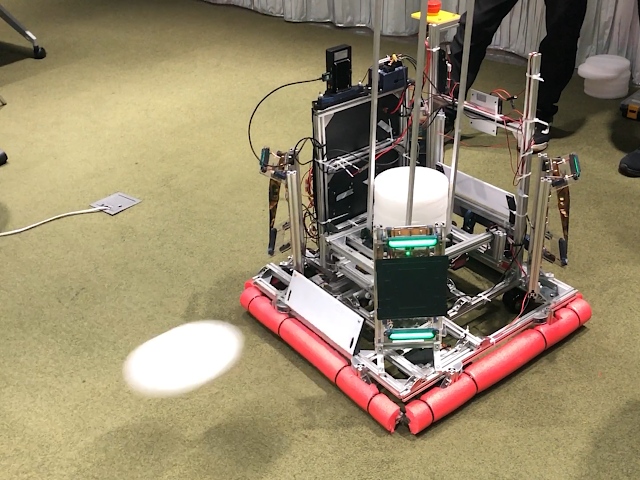
大人チームのロボットから、フリスビーが発射される様子
このことは、ジュニアチームのロボットの調整を行っていた先生にも伝えられました。早速、同じようにローラーの穴を深くしてみたところ、ローラーが取れることがなくなり、こちらもフリスビーを勢いよく飛ばすことができました。
ジュニアチームのロボットから、フリスビーが発射される様子
大人チームのロボットには他にも、発射ユニットの角度調節用のサーボモータが上手く噛み合わなくなったり、右スティックの操作が左右反転していたりなどの、いくつかの不具合がありましたが、全て修正することができました。
また、ジュニアチームのロボットの方も、ニュートラルポジションの問題等を、大人たちの魔法の力(物理)で解決することができました。
こうして両チームとも、ロボットを大会に出場できる状態にすることができました。
最後に近藤さんが、大人チームのロボットの回路ユニットにもカバーを付けてくれました。
カバーを付けている様子
今回の活動を振り返って
今回の活動では、なんとか無事にロボットを大会に出場できる状態にすることが出来てよかったです。
そして次回は、いよいよロボット競技大会の本番です。わたしたちのロボットは、一体どのような活躍を見せてくれるのでしょうか?
それでは、次回の活動報告をお楽しみに。
次回はいよいよ最終回!
続きはこちらから↓↓↓


 【お仕事体験レポ】ラムネでお薬を作る薬剤師体験!|かしわ環境フェスタin柏の葉2024
【お仕事体験レポ】ラムネでお薬を作る薬剤師体験!|かしわ環境フェスタin柏の葉2024 ラムネ作りで薬剤師体験!「医療のエコ活動」ってなんだろう? ~in 柏の葉イノベーションフェス2024~
ラムネ作りで薬剤師体験!「医療のエコ活動」ってなんだろう? ~in 柏の葉イノベーションフェス2024~ “からだとこころのコンディショニング”してみませんか? ママのためのヘルスケアプログラム「健幸スマイルスタジオ」
“からだとこころのコンディショニング”してみませんか? ママのためのヘルスケアプログラム「健幸スマイルスタジオ」 〔求人〕第6期ママライター募集!!
〔求人〕第6期ママライター募集!! カロママ+、ベジチェック、歩行チェック、ママでも気軽に楽しく健康になれるサービスを取材しました。
カロママ+、ベジチェック、歩行チェック、ママでも気軽に楽しく健康になれるサービスを取材しました。